
以下应用案例摘自 Advanced Conveyor Technologies (AC-Tek) 的 David J. Kruse 和 Ryan Lemmon 的“陆上输送机上的现场测量的价值”。 TorqueTrak 10K 临时扭矩测量系统用于提供扭矩数据。
“第一个输送机装置位于北极圈内,极端温度变化范围为 -40°C 至 +25°C。这种特殊的输送机是几个新系统之一。它的长度超过 3 公里,海拔增加约 200 米,可运输 8000 吨/小时的铜矿石。输送机有四个 VFD 驱动器,安装的电机功率总计 9200 kW。
在调试过程中,启动过程中存在明显的振动问题,导致系统无法以超过 3000 吨/小时的吨位启动。AC-Tek 被要求访问现场并获得每个电机轴的准确扭矩测量值。
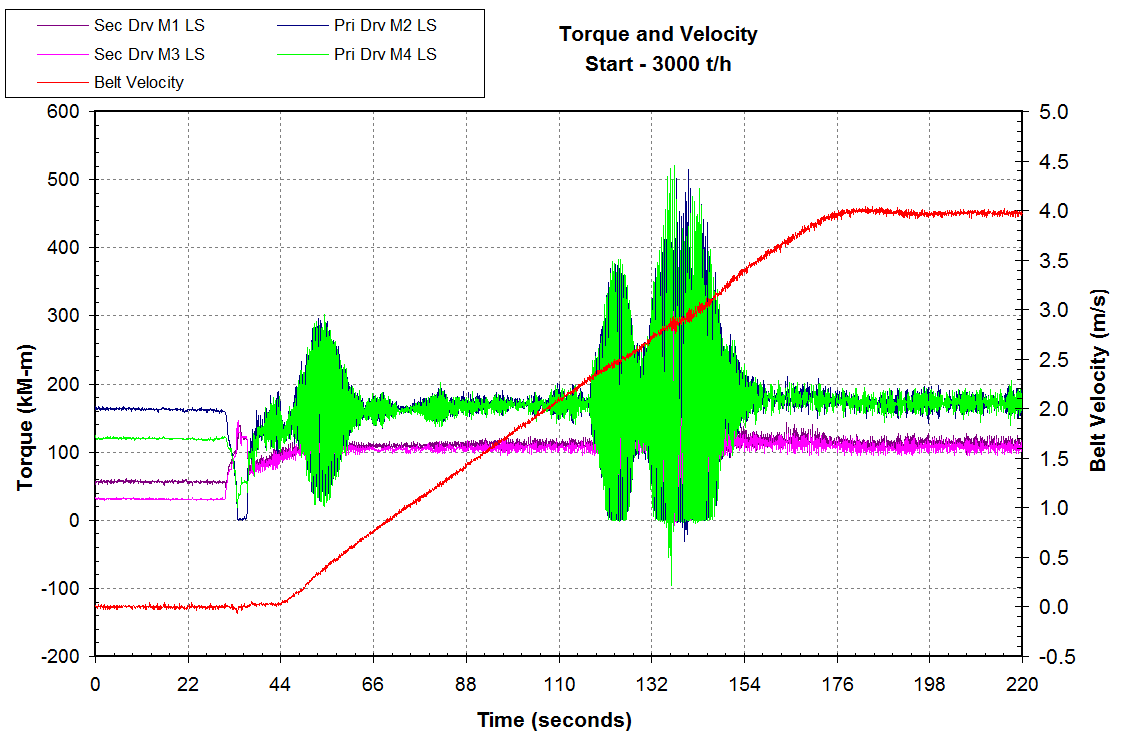
图 1. 启动期间的振动 – 负载共享控制中的电机
图 2 放大了第二次振动期间主驱动器的扭矩。扭矩从 0 kN-m 到 540 kN-m 不等,几乎是该驱动轴电机铭牌额定值的 90%。 该图显示电机 2 (M2) 和电机 4 (M4) 相互摆动。这两个电机都位于主驱动轴上。
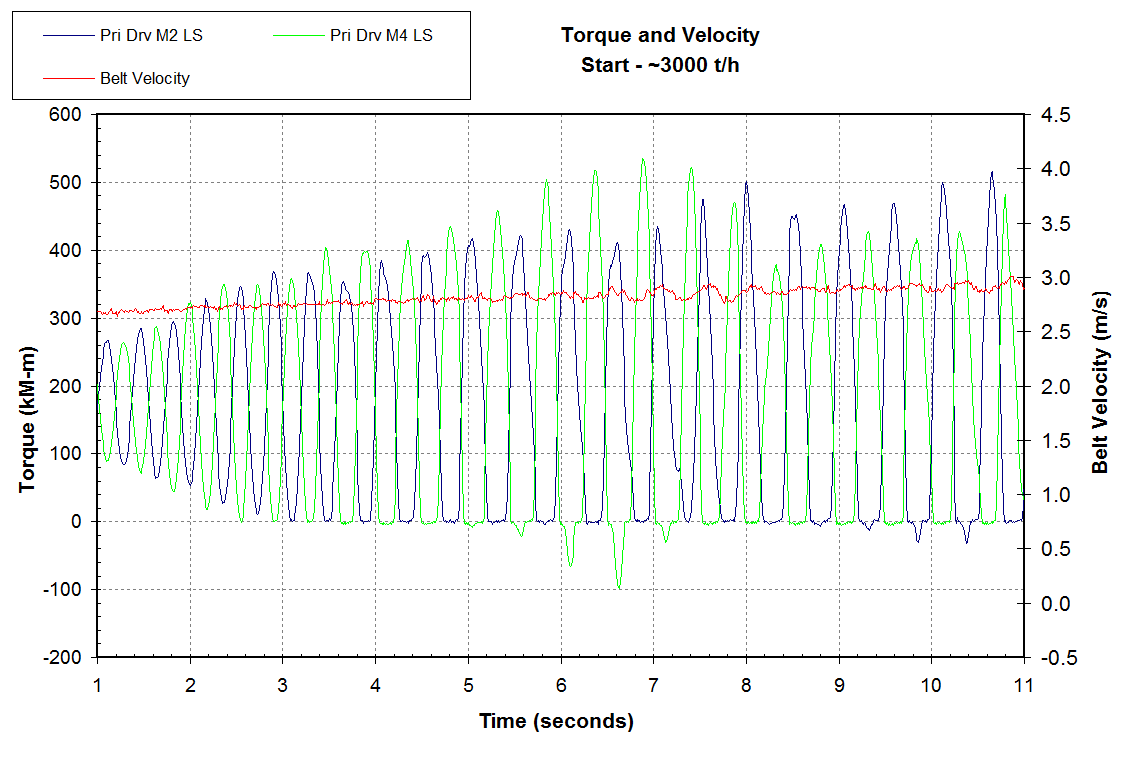
图 2 .启动时振动初级驱动转矩放大图
振动可能是由电机和轴上的制动盘质量的自然振动模式引起的。
电机的控制是主从关系。 主 VFD 驱动器由速度反馈回路控制。其他三个电机的扭矩设置为与主驱动器共享负载。
在对测量结果进行仔细分析并进行多次动态模拟之后,作者建议改变控制原理,以便仅使用速度控制单独控制每个驱动器。 据预测,这种类型的控制将消除同一轴上的电机之间发生的振动。 图 3 显示了控制改变后的电机扭矩和皮带速度。 控制改变后,初始和二次振动几乎完全消除。
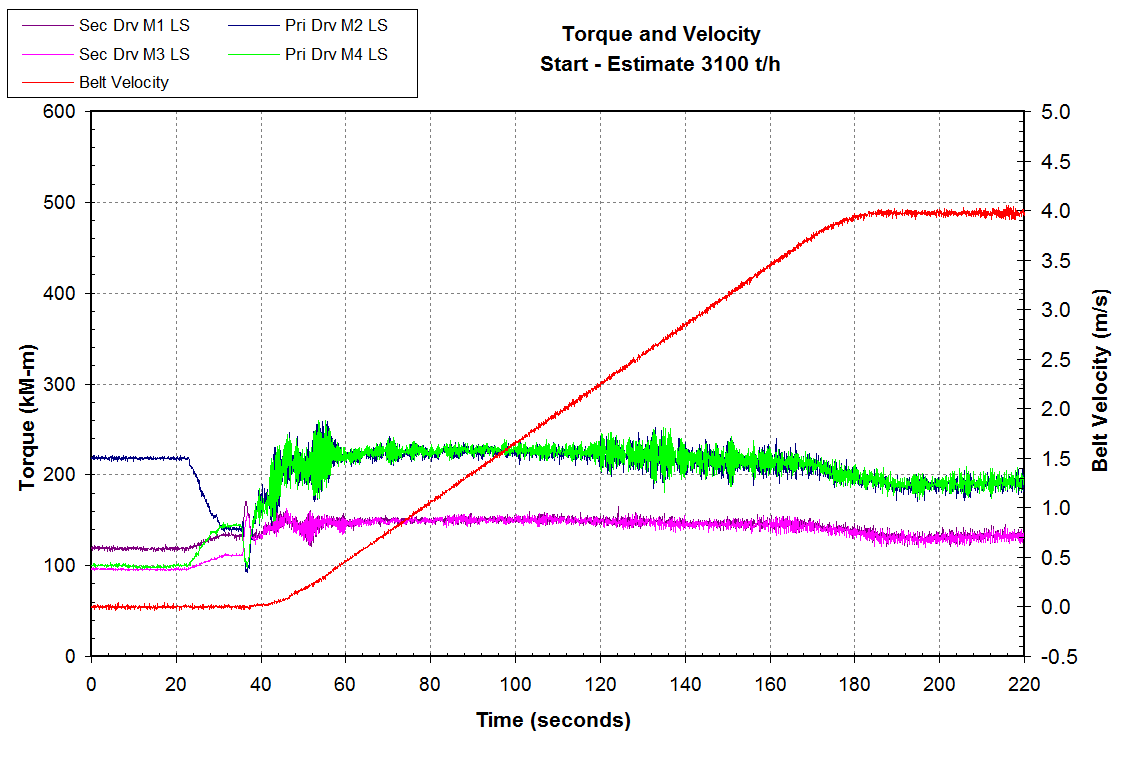
图 3. 电机扭矩和皮带速度 – 速度控制中的电机
输送机的设计需要一个预张紧步骤,该步骤未在控制系统中实施。传送带应短时间保持在全速的 5%。这确保了整个系统在开始主加速斜坡之前处于运动状态。 预张紧传送带可提供更平稳的加速、更低的传送带张力,并将瞬时张力波降至最低。图 4 显示了带有预紧步骤的最终启动。输送带以 4750 t/h 的速度满载(这是当时可用的最大值)。皮带启动平稳,没有任何问题。该系统现已全面运行两年多。
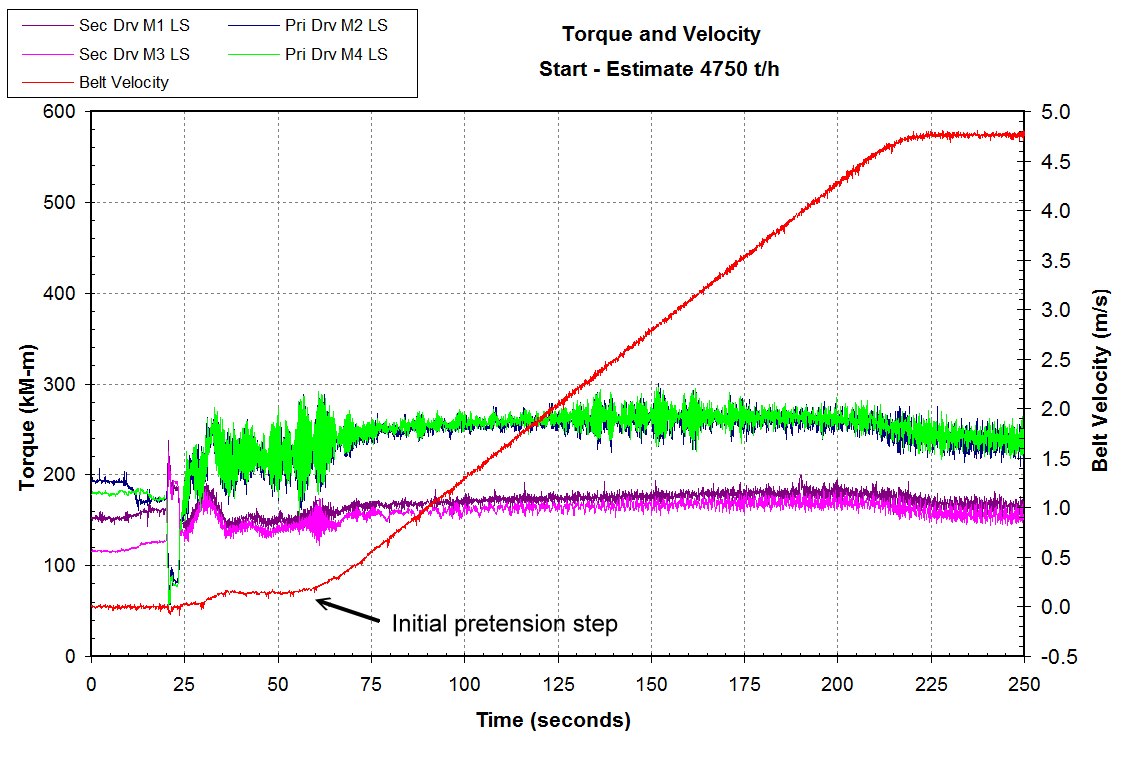
图 4. 电机扭矩和皮带速度——从预张紧步骤开始
即使输送机配备了 VFD 驱动控制,直接应变片测量对于准确识别和纠正驱动控制问题仍然至关重要。结合动态分析和理论预测,快速成功地实现了稳定启动控制。